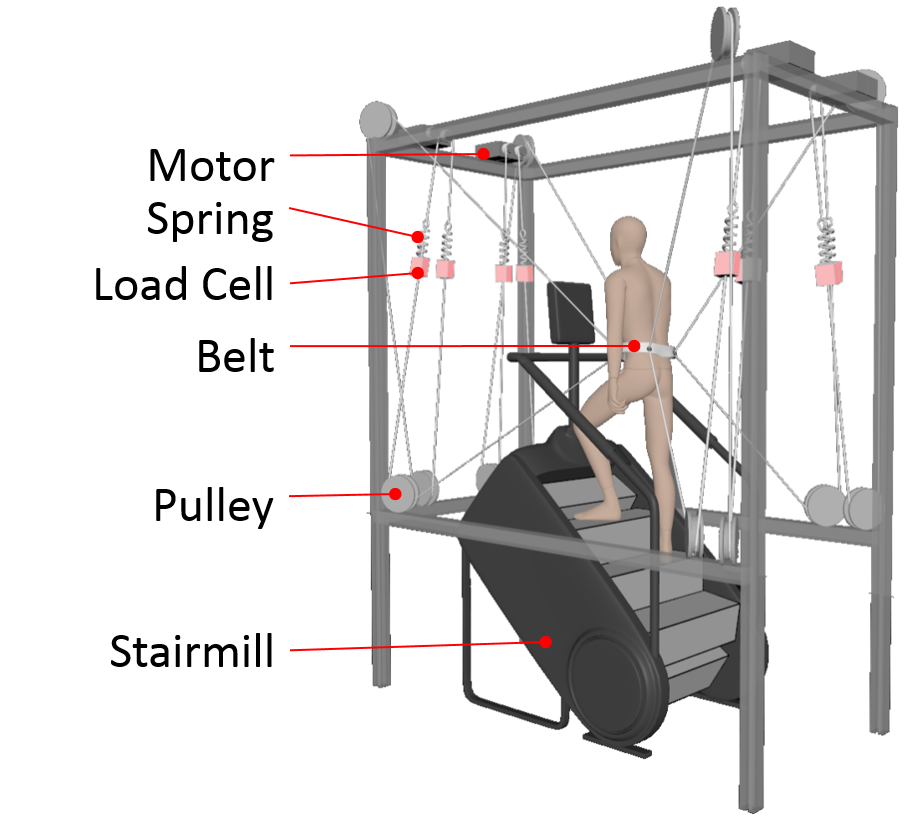
Parallel Cable-driven Robotic Platform for Stair Ascent Study
Stair climbing is a common yet challenging daily task. This activity requires a larger range of lower limb motion, stronger muscle strength, and fine balance control than overground walking. The parallel cable-driven device shown below can apply forces and moments on the pelvis. Hence, this platform helps us understand what kind of force can assist/ train the person to enhance the stair climbing functionality. The applications of this project could be training militaries and firefighters to improve their performance on stairs and rehabilitation for patients.
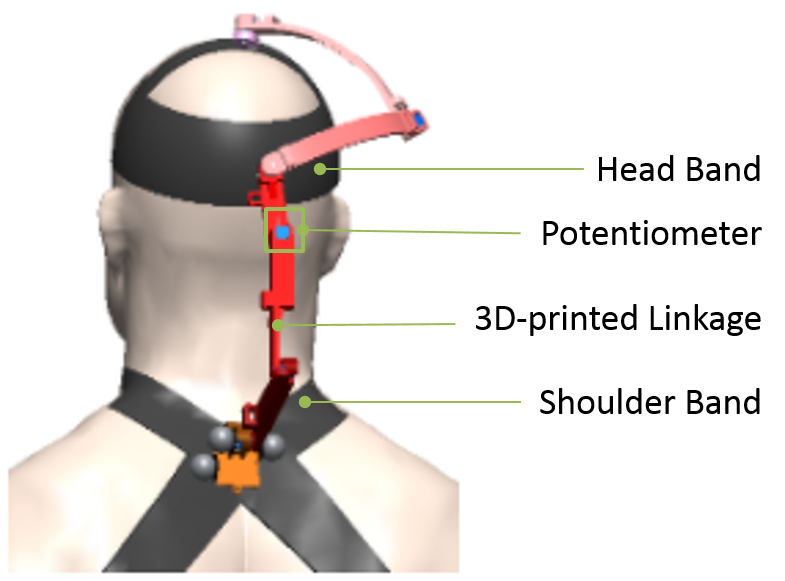
6-degree-of-freedom Serial Chain Neck Brace for Head Range of Motion Measurement
Patients who undergo neck dissection surgery may have a smaller head range of motion than before surgery. Thus, it is important to characterize the range of change as a reference for rehabilitation. Inertial measurement units (IMUs) are often used to measure rotation angle changes. However, the angle drift issue makes the IMU sensor less accurate. Hence, this measurement brace below can measure full head motion without data drift and is easy to use in clinics. Adding springs or motors can further expand this brace to a passive or active neck brace for rehabilitation.
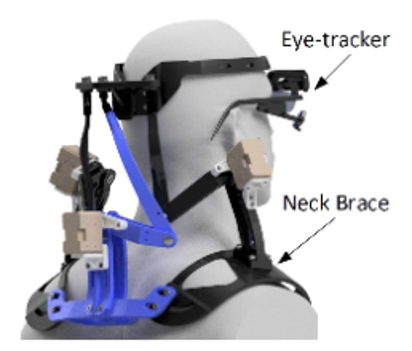
Gaze-based Robotic Neck Brace Control for People with Head Drop Issue
Patients with head drop syndrome or head control problems have difficulties interacting with others. Social isolation may lead to depression and lower quality of life. In this work, we enable patients to intuitively control their head orientations by mimicking the eye-head coordination mechanism. The relationship between head motion and vestibulo-ocular reflex helps estimate desired head rotation by tracking the gaze. Besides assisting head movement, it can also be used as a gaming device in the future.
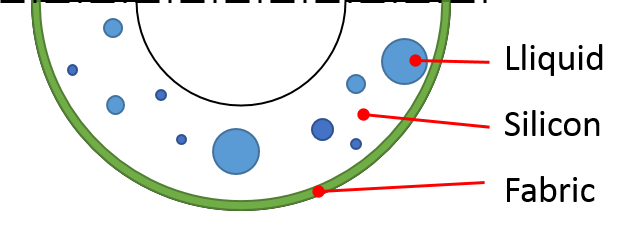
Soft Bending Actuator as an Artificial Muscle
Rigid actuators often have difficulties anchoring on humans due to different types of the human body. Soft actuators fit better on the human body from an ergonomic point of view. Below is a soft-bending actuator prototype that could assist joint rotation. The white silicon expanded when vaporizing the liquid inside. Then, the bending happened when the expansion ratio was different between the two materials. Further investigation and improvement are necessary to increase stroke, speed, and force.